Circuitos,comunicación,conexión y origen de los robots
QUE ES UN CIRCUITO INTEGRADO?
 Un circuito integrado (CI), que entre sus nombres más frecuentes es conocido como chip, es una oblea semiconductora en la que son fabricados muchísimas resistencias pequeñas, también condensadores y transistores. Un CI se puede utilizar como un amplificador, como oscilador, como temporizador, como contador, como memoria de ordenador, o microprocesador. Un CI particular, se puede clasificar como lineal o como digital, todo depende para que sea su aplicación.
Un circuito integrado (CI), que entre sus nombres más frecuentes es conocido como chip, es una oblea semiconductora en la que son fabricados muchísimas resistencias pequeñas, también condensadores y transistores. Un CI se puede utilizar como un amplificador, como oscilador, como temporizador, como contador, como memoria de ordenador, o microprocesador. Un CI particular, se puede clasificar como lineal o como digital, todo depende para que sea su aplicación.
TRES TIPOS DE CIRCUITOS INTEGRADOS:
 -Circuito monolítico: monolítico significa “una piedra”. La palabra es apropiada porque los componentes son parte de un chip. El Circuito monolítico es el tipo más común de circuito integrado, ya que desde su intervención los fabricantes han estado produciendo los circuitos integrados monolíticos para llevar a cabo todo tipo de funciones. Los tipos comercialmente disponibles se pueden utilizar como amplificadores, reguladores de voltaje, conmutadores, receptores de AM, circuito de televisión y circuitos de ordenadores. Pero tienen limitadores de potencia
-Circuito monolítico: monolítico significa “una piedra”. La palabra es apropiada porque los componentes son parte de un chip. El Circuito monolítico es el tipo más común de circuito integrado, ya que desde su intervención los fabricantes han estado produciendo los circuitos integrados monolíticos para llevar a cabo todo tipo de funciones. Los tipos comercialmente disponibles se pueden utilizar como amplificadores, reguladores de voltaje, conmutadores, receptores de AM, circuito de televisión y circuitos de ordenadores. Pero tienen limitadores de potencia
-Circuito híbrido de capa fina: Son muy similares a los circuitos monolíticos, pero además, contienen componentes difíciles de fabricar con tecnología monolítica.
-Circuito híbrido de capa gruesa: Se apartan bastante de los circuitos monolíticos. De hecho suelen contener circuitos monolíticos sin cápsula, transistores, diodos, etc., sobre un sustrato dieléctrico, interconectados con pistas conductoras.
¿QUE SON COMPUERTAS LÓGICAS?
Una compuerta lógica es un dispositivo que nos permite obtener resultados, dependiendo de los valores de las señales que le ingresemos. Es necesario aclarar entonces que las compuertas lógicas se comunican entre sí (incluidos los microprocesadores), usando el sistema BINARIO. Este consta de solo 2 indicadores 0 y 1 llamados BIT dado que en electrónica solo hay 2 valores equivalentes 0=0 volt 1=5volt (conectado-desconectado). Es decir que cuando conectamos una compuerta a el negativo equivale a introducir un cero (0) y por el contrario si derivamos la entrada a 5v le estamos enviando un uno (1). Ahora para

Compuerta negadora o NOT
Se trata de un amplificador inversor, es decir, invierte el dato de entrada y lo saca sobre una salida de baja impedancia, que admite la carga de varias compuertas en paralelo, o de un display de baja impedancia; por ejemplo si se pone su entrada a 1 (nivel alto) se obtiene una salida 0 (o nivel bajo), y viceversa. Esta compuerta dispone de una sola entrada que llamaremos A. Su operación lógica genera una salida S igual a la entrada A invertida.

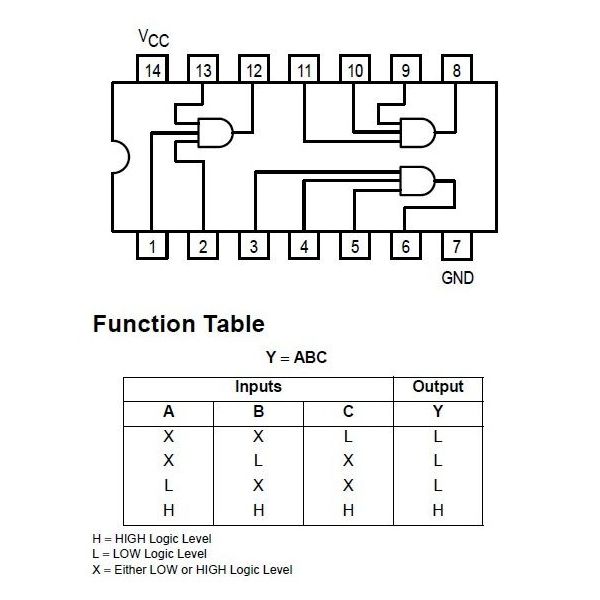
Compuerta AND ó “Y”
Una compuerta AND tiene dos entradas como mínimo y su operación lógica es un producto de ambas entradas. El lector no se debe confundir porque las operaciones lógicas pueden no concordar con las aritméticas, aunque en este caso particular coincidan. Su salida será alta si sus dos entradas están a nivel alto.El nombre aclara la función. Deben estar altos A y B para que se levante S.
Una aplicación de esta compuerta puede ser un sistema de seguridad para un balancín. Para evitar que las manos del operario estén dentro de la zona de presión, se colocan dos pulsadores que ponen un uno en cada entrada. Los pulsadores están bien separados entre si. Recién cuando el operario los pulse aparece un uno en la salida que opera el relay del motor.
Compuerta OR ó “O”
 Al igual que la anterior posee dos entradas como mínimo y la operación lógica, será una suma entre ambas. Aquí podemos ver que la operación aritmética no coincide con la lógica ya que la ultima condición de la tabla de verdad es 1+1=1 y en la operación aritmética seria 1+1=2. La operación lógica O es inclusiva; es decir que la salida es alta si una sola de las entradas es alta o inclusive si ambas lo son. Es decir, basta que una de las entradas sea 1 para que su salida también lo sea. Deben ser altas A “o” B o ambas al mismo tiempo, para que la salida sea alta.
Al igual que la anterior posee dos entradas como mínimo y la operación lógica, será una suma entre ambas. Aquí podemos ver que la operación aritmética no coincide con la lógica ya que la ultima condición de la tabla de verdad es 1+1=1 y en la operación aritmética seria 1+1=2. La operación lógica O es inclusiva; es decir que la salida es alta si una sola de las entradas es alta o inclusive si ambas lo son. Es decir, basta que una de las entradas sea 1 para que su salida también lo sea. Deben ser altas A “o” B o ambas al mismo tiempo, para que la salida sea alta.
Compuerta OR-EX ó XOR ó “O exclusiva”
 En nuestro caso la OR Exclusiva tiene dos entradas (pero puede tener más) y lo que hará con ellas será una suma lógica entre “A” por “B”invertida y “A”invertida por “B”. Todo un lío si consideramos su fórmula pero su tabla de verdad es muy sencilla y su descripción también, ya que la salida será alta solo si una de las entradas lo es, pero no lo es, si lo son las dos al mismo tiempo.
En nuestro caso la OR Exclusiva tiene dos entradas (pero puede tener más) y lo que hará con ellas será una suma lógica entre “A” por “B”invertida y “A”invertida por “B”. Todo un lío si consideramos su fórmula pero su tabla de verdad es muy sencilla y su descripción también, ya que la salida será alta solo si una de las entradas lo es, pero no lo es, si lo son las dos al mismo tiempo.Compuertas lógicas combinadas
Al agregar una compuerta NOT a la salida de cada una de las compuertas anteriores los resultados de sus respectivas tablas de verdad se invierten, y dan origen a tres nuevas compuertas: NAND, NOR y NOR-EX. Veamos ahora sus características y cual es el símbolo que las representa.
La compuerta NAND responde a la inversión del producto lógico de sus entradas, en su representación simbólica se reemplaza la compuerta NOT por un círculo sobre su salida.

Una compuerta NOR se obtiene conectando una NOT a la salida de una OR. El resultado que se obtiene a la salida de esta compuerta resulta de la inversión de la operación lógica “o inclusiva” es como un “no a y/o b”. Igual que antes, solo se agrega un círculo a la compuerta OR y ya se obtiene el símbolo de una NOR.
La compuerta NOR-EX, es simplemente la inversión de la compuerta OR-EX, los resultados se pueden apreciar en la tabla de verdad en donde la columna S es la negación de la anterior. El símbolo que la representa se obtienen agregando un circulo a la salida de una OR-EX.

Las compuerta “buffer” sería una compuerta negadora detrás de otra negadora lo cual no parece tener sentido ya que la tabla de verdad seria una repetición de la entrada en la salida. Pero sin embargo existen y tienen un uso muy importante aclarado por su nombre que significa expansora o reforzadora. Se usan para alimentar a un conjunto de compuertas conectadas sobre su salida. El buffer en realidad no realiza ninguna operación lógica, su finalidad es amplificar la señal (o refrescarla para decirlo de otra manera ya que no se incrementa su amplitud sino su capacidad de hacer circular corriente. Como puede ver en la figura 12 la señal de salida es la misma que la de entrada.

CONEXIÓN Y COMUNICACIÓN
-ALÁMBRICA: es aquella forma de comunicación eléctrica que se necesita un soporte físico para la transmisión de la señal eléctrica. Este soporte físico será un cable y dependiendo las características de la comunicación el tipo de cable será distinto

SISTEMAS DE COMUNICACIÓN ALÁMBRICA
-TELÉGRAFO: es un dispositivo que utiliza señales eléctricas para la transmisión de mensajes de texto codificados, como con el código morse, mediante líneas alámbricas o radiales.
El telégrafo eléctrico, o telégrafo, reemplazo a los sistemas de transmisión de señales ópticas de semáforos, como los diseñados por Claude chappe para el ejército francés, y Friedrich Clemens Geker para el ejército prusiano, convirtiéndose así en la primera forma de comunicación eléctrica.
-TELETIPO: es un dispositivo telegráfico de transmisión de datos ya obsoleto utilizado durante el siglo XX para enviar y recibir mensaje mecanografiados punto a punto a través de un canal de comunicación simple.
INALÁMBRICA

La comunicación inalámbrica o sin cables es aquella en la que la comunicación (emisor/receptor) no se encuentra unida por un medio de propagación físico, sino que se utiliza la modulación de ondas electromagnéticas a través del espacio. En este sentido, los dispositivos físicos sólo están presentes en los emisores y receptores de la señal, entre los cuales encontramos: antenas, computadoras portátiles, PDA, teléfonos móviles, etc.
Empezaremos por la radio analógica y acabaremos con lo más nuevo como los sistemas LTE o LIFI y las redes informáticas.
COMUNICACIÓN VÍA SATÉLITE
 Los satélites de comunicación son capaces de trasmitir y recibir señales que transportan información en forma analógica o digital de alta calidad. La mayoría de los satélites de comunicación son estacionarios (giran en una órbita a la misma velocidad de rotación que la tierra, es decir siempre están en el mismo punto con respecto a la tierra) y a una altura de 36.000Km.
Los satélites de comunicación son capaces de trasmitir y recibir señales que transportan información en forma analógica o digital de alta calidad. La mayoría de los satélites de comunicación son estacionarios (giran en una órbita a la misma velocidad de rotación que la tierra, es decir siempre están en el mismo punto con respecto a la tierra) y a una altura de 36.000Km.
Los satélites llevan unos paneles solares para recibir energía solar que la almacena en baterías. Esta energía luego la utiliza para mandar las señales, y en caso de que el satélite se desvíe de su órbita, para impulsar unos motores que le devuelven a la órbita inicial.
COMUNICACIÓN TELEFÓNICA

El teléfono fue inventado por Alexander Graham Bell, quien presentó en Pensilvania en el año 1876 el modelo final de este aparato, después de haber hecho muchos ensayos a partir del telégrafo. A partir de ese momento se empezaron a tender las redes telefónicas bajo tierra en todo el mundo.
REDES TELEFÓNICAS

{kind=link}
ORÍGENES DE LOS ROBOTS
Autómatas en la historia.
Antiguamente, se creaban artefactos capaces de realizar tareas diarias y comunes para los hombres, o bien, para facilitarles las labores cotidianas; se daban cuenta de que había tareas repetitivas que se podían igualar con un complejo sistema, y es así como se comienza a crear máquinas capaces de repetir las mismas labores que el hombre realizaba.
Pero no todos estos artefactos tenían una utilidad, algunas máquinas solamente servían para entretener a sus dueños, y no hacían nada más que realizar movimientos repetitivos ó emitir sonidos. Cabe mencionar que los árabes fueron unos maestros en la construcción de autómatas y en la precisión de sus cálculos, y como ejemplo de ello, se puede mencionar que inventaron el reloj mecánico, así como sus grandes aportaciones a la astrología. También los ingenieros griegos aportaron grandes conocimientos a los autómatas, aunque su interés era más bien hacia el saber humano más que hacia las aplicaciones prácticas.
Los primeros autómatas que aparecen en la historia son ingenios mecánicos más o menos complicados que desarrollaban un programa fijo, que no empleaban necesariamente la noción de realimentación. Inventor musulmán Al-Jazari desarrolla una serie de fascinantes y prácticos autómatas, los cuales van desde una orquesta animada por seres mecánicos, hasta una sirvienta de aspecto humanoide y capaz de servir tragos y bebidas calientes a intervalos regulares.
Los primeros ejemplos de autómatas se registran en la antigua Etiopía. En el año 1500 a. C., Amenhotep, hermano de Hapu, construye una estatua de Memnon, el rey de Etiopía, que emite sonidos cuando la iluminan los rayos del sol al amanecer.
King-su Tse, en China, en el 500 a. C. inventa una urraca voladora de madera y bambú y un caballo de madera que saltaba. Entre el 400 y 397 a. C., Archytas de Tarento construye un pichón de madera suspendido de un pivote, el cual rotaba con un surtidor de agua o vapor, simulando el vuelo. Archytas
es el inventor del tornillo y la polea. En el año 206 a. C., fue encontrado el tesoro de Chin Shih Huang Ti consistente en una orquesta mecánica de muñecos, encontrada por el primer emperador Han.
es el inventor del tornillo y la polea. En el año 206 a. C., fue encontrado el tesoro de Chin Shih Huang Ti consistente en una orquesta mecánica de muñecos, encontrada por el primer emperador Han.
AUTÓMATAS
{kind=link}

ROBOTS CON CONTROL POR COMPUTADOR

Robots con control por computadora. Son manipuladores o sistemas mecánicos multifuncionales, controlados por un computador, que habitualmente suele ser un microordenador. En este tipo de robots, el programador no necesita mover realmente el elemento de la máquina, cuando la prepara para realizar un trabajo. El control por computador dispone de un lenguaje específico, compuesto por varias instrucciones adaptadas al robot, con las que se puede confeccionar un programa de aplicación utilizando solo el terminal del computador, no el brazo. A esta programación se le denomina textual se crea sin la intervención del manipuladoras grandes ventajas que ofrecen este tipo de robots, hacen que se vayan imponiendo en el mercado rápidamente, lo que exige la preparación urgente de personal cualificado, capaz de desarrollar programas similares a los de tipo informático.
INTRODUCCIÓN AL CONTROL DEL SISTEMA
 El control automático ha jugado un papel vital en el avance de la ciencia y la ingeniería, además de su extrema importancia en vínculos especiales, sistemas de guía de proyectiles, sistemas robóticos entre otros.
El control automático ha jugado un papel vital en el avance de la ciencia y la ingeniería, además de su extrema importancia en vínculos especiales, sistemas de guía de proyectiles, sistemas robóticos entre otros.
con los avances en la teoría y práctica del control automático, se brindan los medios para lograr el funcionamiento óptico de sistemas dinámicos, mejorar la calidad y abaratar los costos de producción, expandir el ritmo de producción, liberar la complejidad de muchas rutinas, de las tareas manuales respectivas.
No hay comentarios.:
Publicar un comentario